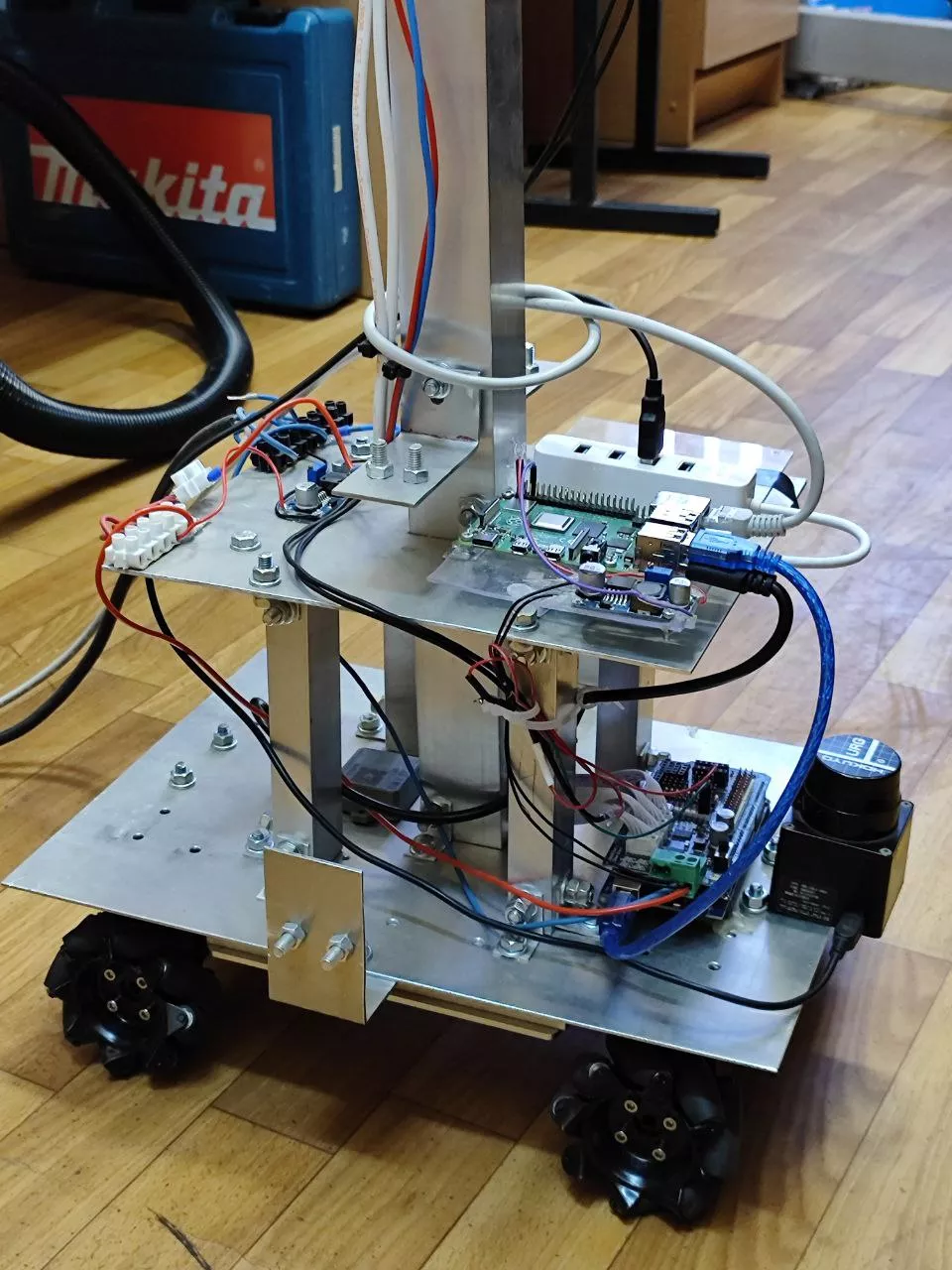
Робот предназначен для транспортировки тяжелых деталей в сборочном цеху опытного конструкторского бюро «Факел». В основе программного продукта, который разрабатывают студенты «Цифровых кафедр» БФУ, лежит принцип адаптивного управления и обратной связи через видеокамеру. В результате ПО «оживит» робота и он сможет перемещаться в пространстве и взаимодействовать с окружающими предметами.
|
Михаил Тарачков, руководитель проекта, генеральный директор ООО «Интеллектуальная робототехника»: |
|
Автономный робот, который ранее разработали студенты, может перемещаться из точки А в точку Б. Он снабжен рядом датчиков: лазерный дальномер (лидар), инерциальный измерительный модуль, энкодеры, которые позволяют определить скорость вращения каждого колеса. Показания со всех датчиков объединяются при помощи фильтра Калмана и алгоритмов семейства SLAM. При наличии всех этих устройств робот, проезжая по местности, может построить ее карту, а затем, если мы укажем точку следования, может туда переместиться, успешно объезжая препятствия. Реализацию всех этих возможностей обеспечивает разрабатываемая в рамках проекта система управления движениями робота. |
 Студенты Института высоких технологий БФУ смогли на предварительном этапе проекта разработать алгоритмы. Благодаря обучению по направлению «Периферийный искусственный интеллект и робототехника» («Цифровые кафедры») они освоили язык программирования Python, изучили специальные инструменты (например, ROS), драйверы для взаимодействия с оборудованием, расширили знания языка С++.
Студенты Института высоких технологий БФУ смогли на предварительном этапе проекта разработать алгоритмы. Благодаря обучению по направлению «Периферийный искусственный интеллект и робототехника» («Цифровые кафедры») они освоили язык программирования Python, изучили специальные инструменты (например, ROS), драйверы для взаимодействия с оборудованием, расширили знания языка С++.
|
«Мои задачи в рамках проекта связаны с разработкой метода обработки поворота и наклона головы робота через сервопривод, а также метода использования джойстика для управления роботом. Первично было составлено уравнение, на основе которого мы с руководителем проекта Михаилом Владимировичем подобрали подходящую библиотеку в Arduino. Впоследствии я написала функцию, которая, пользуясь данными о позиции головы робота, совершала движения так, чтобы соблюдать настройку скорости совершающегося действия и допустимых границ маневров, во избежание выхода сервопривода из строя – на этом данная задача была завершена. Сейчас я работаю над модернизацией джойстика для управления роботом», — отметила студентка, участница проекта Анастасия Бянкина. |
Ещё по теме
Личный кабинет для cтудента
Личный кабинет для cтудента
Даю согласие на обработку представленных персональных данных, с Политикой обработки персональных данных ознакомлен
Подтверждаю согласие