Проекты
|
Разработка нейроморфной системы управления подводного биоморфного робота |
|
Цель — решение фундаментальной проблемы разработки киберфизической (интегрированной с сенсорами) системы управления подводным беспилотным аппаратом биоморфного типа («рыба-робот»). Отдельными научными проблемами при этом являются: исследование и разработка методов обнаружения и классификации объектов на основе сенсорной информации с датчиков различной природы в условиях подводной съемки; обеспечение подводного канала связи; исследования гидрофизических полей, индуцируемых движением биоморфных объектов. Задачи
Ожидаемые результаты проекта лежат в русле современных мировых трендов, направленных на конвергенцию фундаментальных заделов в разработку инновационных технологий и устройств. В части разработки биоморфных роботов одним из ориентиров является MIT (США), которая ведет подобные разработки с 1993 года. В Российской Федерации, по нашим данным, работы по созданию биоморфных подводных роботов до настоящего времени практически не велись. Успешное выполнение проекта безусловно будет иметь потенциал для внедрения в практическую сферу. Это, прежде всего, научный флот нового поколения, где сравнительно дешевые подобные биоморфные роботы могут перевозиться на коммерческих судах и по необходимости автономно выполнять задачи в заданном целевом районе. Высока вероятность и коммерческого интереса к таким разработкам, включая экологический мониторинг, управление биоресурсами, поиск и сопровождение заданных объектов под водой и др. |
|
Разработка экзоскелетов |
|
Целью работы является разработка нейротренажерных комплексов на основе экзоскелетов верхних и нижних конечностей с управлением от интерфейса мозг-компьютер моторно-воображаемого типа для восстановления двигательных функций после инсульта или нейротравм. Результатом разработок являются готовые к производству прототипы экзоскелетонов, управляемых от ИМК, основанных на воображении движений. |
Биоморфный робот-тунец
 |
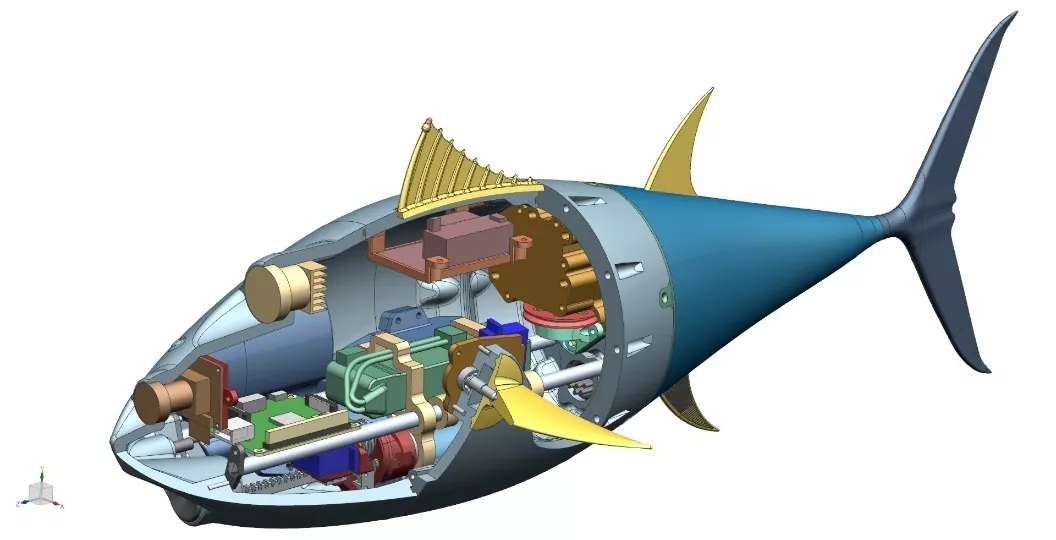 |
Работа сфокусирована на реализации подходов искусственного интеллекта, имитирующих принципы работы живого мозга в задачах управления робототехническими устройствами. Текущий проект данного направления направлен на разработку и создание подводного биоморфного робота – рыбы, который будет воспроизводить принципы движения, навигации и взаимодействия с живыми организмами в естественной среде, как это задумано самой природой. При этом ключевой особенностью разрабатываемого биоморфного робота является нейроуправление, которое позволяет принимать решения и контролировать движения на основе работы современных искусственных нейросетей, а именно биолого-правдоподобных спайковых нейронных сетей.
Для реализации проекта задействованы ученые-биологи, математики, физики, инженеры. Здесь важно продумать каждую деталь — от способа передвижения в воде и использования существующих технологий искусственного интеллекта, до разработки новых алгоритмов ИИ, позволяющих роботу принимать самостоятельные решения в отсутствии под водой привычных технических средств связи и позиционирования, например, таких как GPS. Это первый в Российской Федерации проект по созданию подобного подводного устройства.
Создание биоморфного робота позволит ученым расширить, с одной стороны фундаментальные знания — изучить механику передвижения живых организмов, принципов оптимизации энергопотребления, системы принятия решений и т.д. А, с другой — у проекта есть вполне конкретное практическое применение — управление биоресурсами.
Сотрудники


Личный кабинет для cтудента
Личный кабинет для cтудента
Даю согласие на обработку представленных персональных данных, с Политикой обработки персональных данных ознакомлен
Подтверждаю согласие


